

Our Technology
Meet the robots of NUS Calibur Robotics. These robots are designed and built by students.

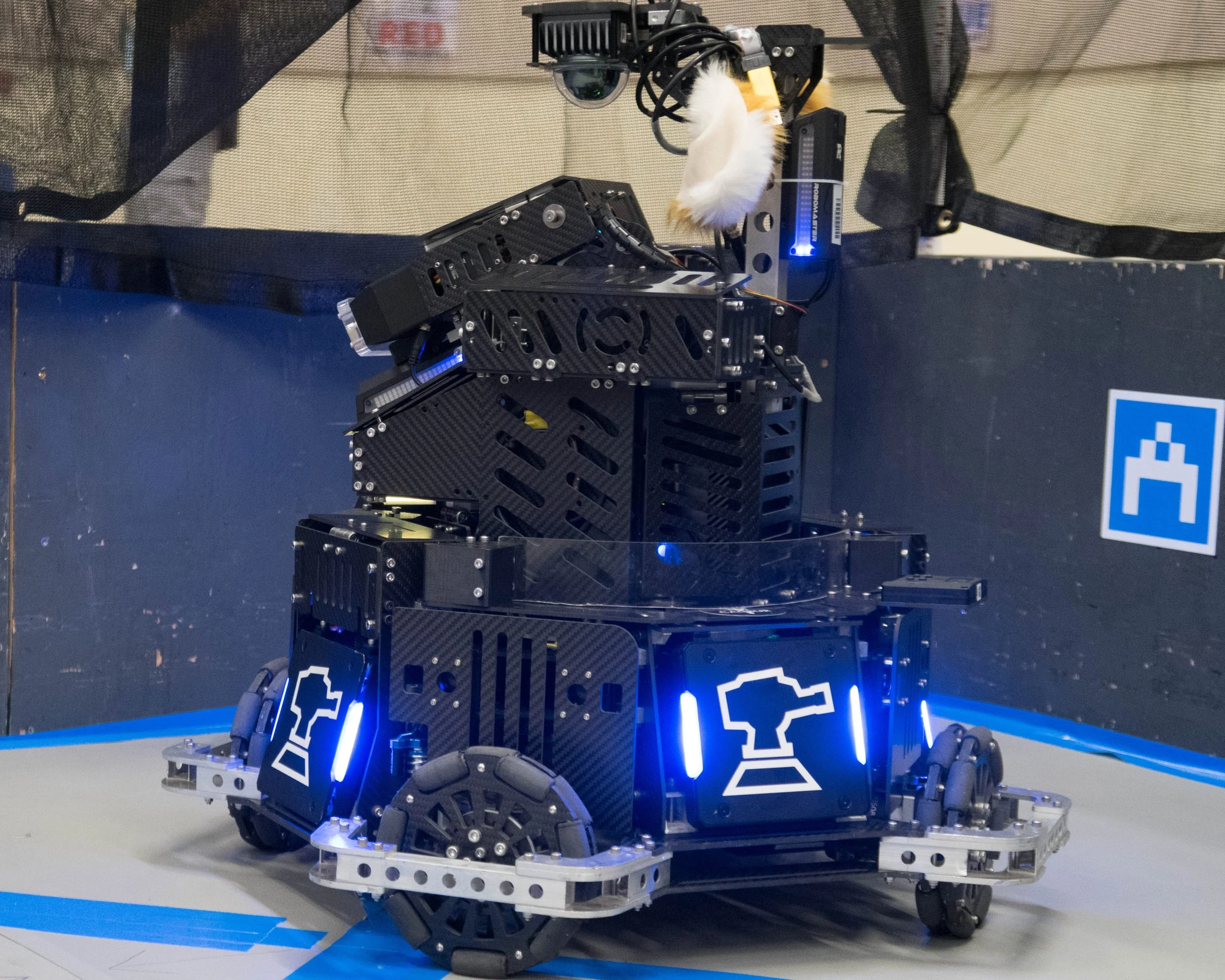
Infantry Robots - Standard
The Standard is a compact autonomous infantry robot engineered for high-speed offensive operations. Equipped with 17 mm projectile launch capability, omnidirectional wheels, and a reinforced suspension system, it achieves agile terrain adaptability and reliable ramp clearance. AI-driven targeting and real-time autonomy enhances performance.
Keywords: Autonomous Systems, Mobile Robot, Omnidirectional Locomotion, AI-driven Robotics, Terrain Adaptability, Computer Vision, Mechatronics
Infantry Robots -Balancing
The Balancing is an agile mobile robot variant optimized for maneuverability and dynamic traversal. Prioritizing mobility and adaptability, it demonstrates advanced locomotion strategies such as jumping and step-scaling to navigate complex environments. While maintaining high-speed movement, it incorporates precision 17 mm projectile firing and real-time control systems.
Keywords: Agile Robotics, Mobile Robot, Dynamic Locomotion, Terrain Adaptability, Autonomous Systems, Real-time Robotics, Mechatronics, AI-driven Control

Engineer Robot
The Engineer is a utility-class mobile robot designed for material handling and task automation. It features a 6-DOF pneumatic robotic arm with a suction-based end-effector, enabling precise manipulation and transport of objects across various environments. This configuration showcases advanced mechatronics, autonomous manipulation, and adaptable automation for research, industrial applications, and competitive robotics settings.
Keywords: Robotic Manipulation, 6-DOF Arm, Pneumatic Systems, End-Effector Design, Autonomous Systems, Mechatronics, Task Automation, Human-Robot Interaction
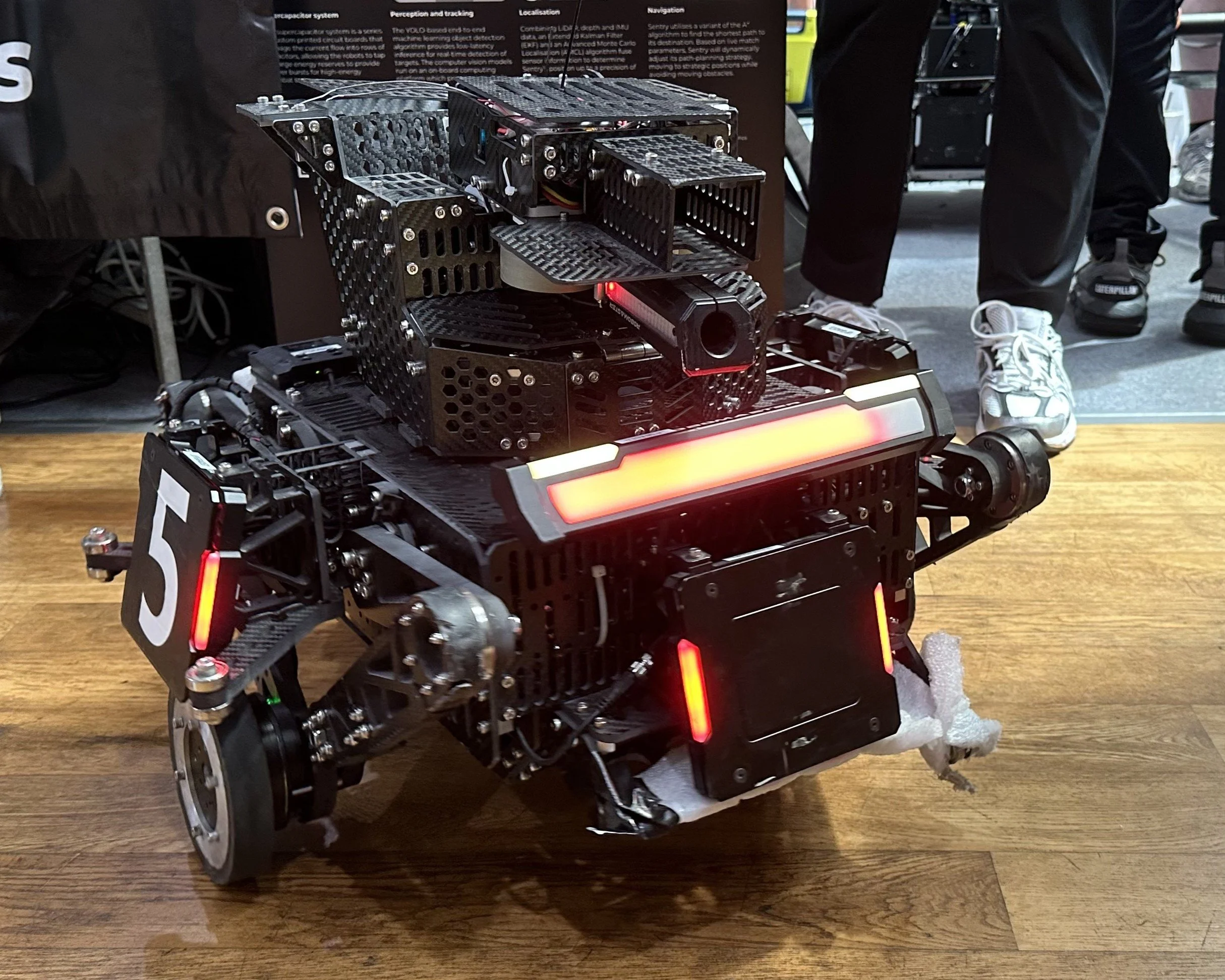
Sentry Robot
The Sentry is an autonomous robot equipped with an independent projectile launcher for base protection and area control. Integrated onboard computing, cameras, and LiDAR sensors enable machine learning–driven perception, object tracking, and path-planning algorithms for efficient navigation and intelligent positioning. This combination of AI-based localization and real-time autonomy enhances its ability to patrol, survey, and operate effectively in dynamic environments.
Keywords: Autonomous Robotics, Machine Learning, Computer Vision, LiDAR, Path Planning, AI-driven Robotics, Real-time Autonomy, Intelligent Navigation
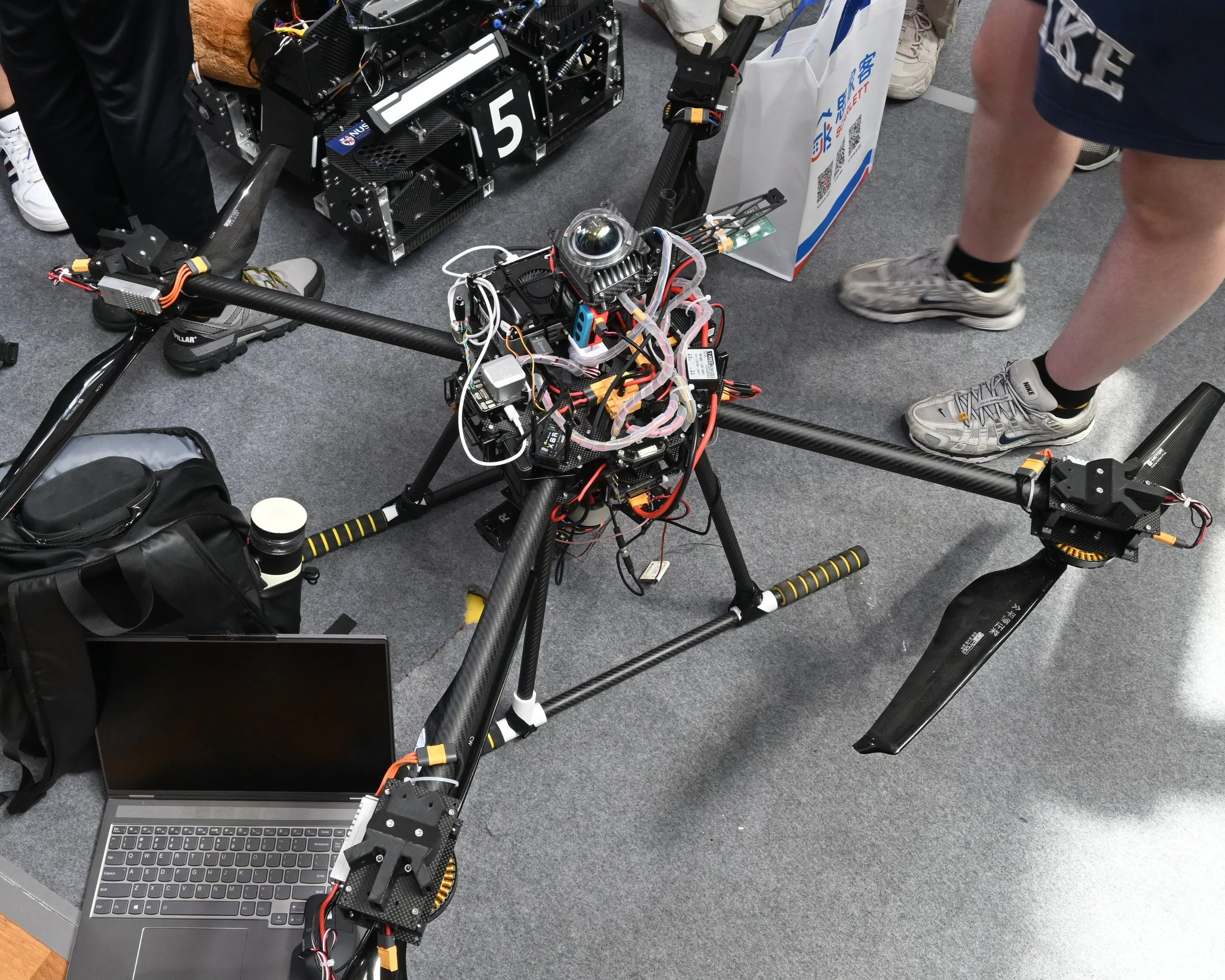
Aerial Robot
The Aerial is an autonomous aerial robot designed for high-mobility vertical operation. Operating within the airspace, it utilizes a projectile-launching system capable of controlled, sustained 17 mm projectile fire via a Gatling system, enabling strategic aerial dominance and enhanced combat effectiveness in competitive scenarios.
Keywords: Aerial Robotics, Autonomous Systems, High-Mobility Platforms, Projectile Systems, AI-driven Robotics, Mechatronics, Real-time Autonomy

Hero Robot
The Hero is a large-class mobile robot designed for high-impact performance in competitive robotics applications. Equipped with a 42 mm projectile-launching system, it provides powerful and precise output for target-based challenges, demonstrations, and strategy-driven gameplay. Its role emphasizes robust engineering and reliable performance in dynamic robotics environments.
Keywords: Mobile Robotics, Autonomous Systems, Projectile Systems, Competitive Robotics, Mechatronics, High-Impact Platforms, Real-time Autonomy